|
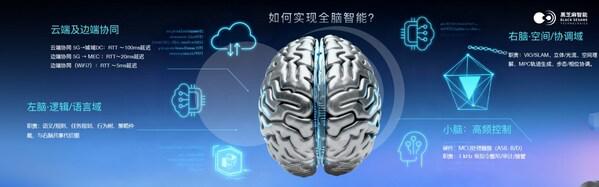
在全球机器人产业加速演进的背景下,一个越来越清晰的共识正在形成:机器人真正走向真实世界,依赖的不只是更高的算力或更复杂的算法,而是一套能够长期稳定运行、持续演进、并且可被产业广泛采用的智能计算基础。 过去十年,机器人经历了从"可编程执行"到"感知驱动控制"的阶段演进,视觉、定位与运动控制逐步成熟。但随着深度学习和 Transformer 架构进入机器人领域,机器人开始承担更复杂的理解、决策与协作任务,系统复杂度呈指数级上升。真实世界中不断变化的光照、环境、人类行为和任务目标,使得传统"模块割裂、静态部署"的机器人架构逐渐暴露出瓶颈。 在这一背景下,黑芝麻智能推出 SesameX 多维具身智能计算平台。SesameX 的目标并非构建一个封闭的全栈系统,而是面向产业伙伴提供一套开放、可扩展、可量产的机器人智能计算底座,帮助机器人从"可运行"走向"可成长",从单点能力展示迈向长期商业化落地。 一、SesameX 多维具身智能计算平台:让机器人真正从"可运行",走向"可成长" SesameX 在平台设计的早期阶段,就将"可成长性"作为核心目标之一。所谓成长,并非简单依赖模型规模扩大,而是系统能够在真实环境中持续稳定运行,并在反馈中逐步优化行为表现。 传统机器人系统往往以任务为中心进行设计,感知、规划、控制彼此分离,模型部署完成即进入长期静态运行状态。一旦环境变化或任务复杂度提升,系统需要重新设计、重新标定,难以支撑规模化落地。 SesameX 通过在平台层面引入统一的计算结构、任务表达方式和执行调度机制,使机器人在架构上具备持续演进的基础条件。不同来源的感知模型、规划算法和控制策略可以在同一平台内协同运行,并在系统运行过程中形成稳定的闭环反馈,从而支持机器人能力随时间逐步提升。这种设计,使机器人首次在工程层面具备了从"任务执行型"向"认知理解型"再向"全脑协同型"演进的现实路径。 1.如何实现全脑智能? 黑芝麻智能提出"全脑智能(Whole-Brain Intelligence)"作为机器人计算平台的长期设计目标。该理念并非强调单一模型或算力的突破,而是借鉴人类大脑多区域协同工作的方式,将语言理解、空间感知、决策推理和运动控制等能力,在系统层面进行统一组织和协同调度。
在 SesameX 平台中,全脑智能并不是通过某一个"超级模型"实现,而是通过以下几个层面的协同: 在计算层面,通过异构算力单元(CPU、NPU、DSP、MCU 等)的统一调度,使不同类型的任务在合适的计算资源上高效执行; 在系统层面,通过统一的任务表达和执行机制,使感知、规划与控制之间不再依赖人工拼接,而是形成连续的信息流; 在模型层面,通过多模态模型与原子化能力组合,使来自不同算法体系和生态伙伴的模型能够自然协同。 通过这种方式,SesameX 将原本分散在多个子系统中的智能能力重新组织为一个持续协作的整体,使机器人在复杂环境中能够形成稳定、一致的跨模态理解与行为输出,而非碎片化响应。 2.如何面对机器人安全挑战? 与汽车等高度结构化场景不同,机器人通常与人类共享空间,安全不只是防止硬件故障,更是一种系统级能力。安全意味着行为可预测、状态可解释、异常可恢复,并在极端情况下仍能最大程度保护人类。
SesameX 并未将安全视为某一个独立模块,而是将安全理念贯穿于整个平台架构之中。从感知输入、算力调度、任务执行到控制输出,每一层都引入明确的安全约束和兜底机制。 平台通过L0~L5多层级安全体系,使机器人在传感器异常、模型输出异常、资源争抢或任务冲突等情况下,能够自动进入受控状态,包括限速、重规划或安全停机。这种系统级安全设计,使机器人不再依赖单点正确性,而是具备整体可控、可预测的运行特性,为商业化部署提供必要前提。 3.机器人"如何行动、如何保护人类"? 为了在真实环境中实现安全与自主并存,SesameX 将复杂的安全需求抽象为六层安全机制,从物理行为一直延伸到数据与系统安全,形成由下而上的整体防护结构。 在执行过程中,系统会持续监测传感器状态、运动趋势、人机距离以及决策稳定性。一旦检测到潜在风险,平台可在不同层级采取干预措施,从动作约束到策略降级,确保行为不越界。 在最高层的数据安全层,平台通过本地推理、加密传输和系统完整性保护机制,防止数据泄露和系统被篡改。这一设计使机器人不仅在物理层面安全可控,在数字层面同样具备可信基础。 4.感知、算力和智力如何融合成完整有机体? 在真实世界中,机器人往往面临这样一种矛盾:传感器"看得很清楚",算力"也足够强",但整体行为却依然迟缓、割裂,甚至在复杂场景下出现不稳定的动作和判断。这种现象并非源于单一模块能力不足,而是系统层面缺乏统一的协同机制。
以典型的服务或巡检机器人为例,当机器人在人员密集环境中行进时,需要同时完成多项任务:视觉系统持续识别行人和障碍物,定位系统更新自身位姿,规划模块实时调整路径,控制系统保证运动平稳;与此同时,上层任务逻辑可能还在接收新的目标或指令。如果这些能力分别运行在相互独立的子系统中,数据在多次拷贝与异步调度中流转,系统就容易出现延迟累积、决策滞后或行为不连贯的问题。 SesameX 的设计出发点,正是将这些原本分散的能力重新组织为一个统一协同的整体。平台在计算层面通过异构算力融合,使感知、推理和控制不再是"各自为战"的计算单元,而是接入同一算力网络,由统一调度机制进行管理。不同任务根据实时性和安全等级,被分配到最合适的计算资源上执行,从而避免关键控制任务被高负载推理任务干扰。 在系统层面,SesameX 通过统一的数据通路和任务表达方式,将感知结果、决策逻辑和控制指令纳入同一执行链路。来自摄像头、激光雷达或其他传感器的数据,可以在最少的中间拷贝下直接进入推理和规划环节,缩短从"看到"到"行动"的反应路径。这种端到端一致的数据流,使机器人在动态环境中能够更快地响应突发变化。 在智能表达层面,平台通过原子模型与任务图的组合方式,把复杂行为拆解为可复用、可组合的智能单元。例如,在仓储、商服或巡检场景中,避障、跟随、定位、交互等能力可以根据实时环境被动态组合,而不再依赖固定流程。这种"积木式"智能结构,使机器人在面对不同场景时能够灵活调整行为策略,而不是被限定在预设路径中。 通过上述多层协同,SesameX 让机器人从"多个模块拼装的系统"转变为一个具备统一感知、统一决策和统一行动逻辑的有机整体。机器人不再只是执行单点任务,而是能够在复杂环境中形成连贯、稳定、可预测的行为表现,为真实世界应用提供必要的系统可靠性。 5.如何实现闭环进化? 真实世界永远比实验环境更复杂。光照变化、环境反射、人流密度、地面材质、设备老化等因素,都会在长期运行中不断影响机器人性能。许多机器人在初期测试中表现良好,但随着部署时间延长,定位漂移、识别准确率下降、动作变得保守或不稳定,最终需要频繁人工介入。
SesameX 在平台设计中引入"闭环进化"的理念,目的是让机器人在真实运行中持续积累经验,而不是在部署完成后停止成长。这一闭环并不局限于某一种训练框架或工具链,而是通过标准化的数据与接口,将机器人运行过程自然纳入持续优化链路。 在实际场景中,机器人在执行任务的同时,会对关键运行指标进行持续记录,包括感知稳定性、模型推理延迟、任务成功率以及异常触发情况。这些信息不会简单堆积为日志,而是经过结构化整理,用于判断系统在不同场景下的表现差异。 当机器人在新环境中遇到性能下降或异常行为时,平台可以通过对比历史运行数据,定位问题来源:是感知模型对特定光照不敏感,还是规划策略在拥挤环境中过于保守,或是算力资源分配不合理导致延迟波动。这种基于运行数据的分析,为后续优化提供了明确方向。 在优化阶段,SesameX 并不强制限定模型更新方式。合作伙伴可以选择在本地进行模型微调,也可以在云端结合仿真环境进行再训练。平台通过统一接口支持模型更新、参数调整和策略回滚,使优化过程对现场运行影响最小。 当新的模型或策略被部署回机器人后,系统会在受控条件下逐步验证其效果,并继续进入下一轮反馈。这种渐进式的迭代方式,使机器人能力在长期运行中稳步提升,而不会因一次更新带来不可控风险。 通过这一闭环机制,机器人不再是一次性交付的产品,而是具备持续演进能力的系统。随着部署规模扩大,来自不同场景的数据还可以反向促进算法和系统设计的优化,形成技术与应用相互推动的良性循环,为商业化落地提供长期价值。 二、SesameX 多维具身智能计算平台:一套"从端侧模组到全脑智能的体系化计算的全栈自研平台" SesameX 多维具身智能计算平台提供了一套从硬件模组到系统软件的完整计算体系,其目标并非替代行业生态,而是为机器人厂商和算法伙伴提供一个可靠、可扩展的基础平台。平台通过模块化设计、统一接口和兼容主流生态的方式,帮助合作伙伴降低系统集成复杂度,加速产品从研发走向量产。
1.计算平台层 Module SesameX 的计算系统由我们自主研发的三款计算模块 Kalos、Aura 和 Liora 构成,分别面向不同类型与复杂度的机器人算力需求。在计算平台这一层,我们提供的不仅是三款单独的模组,而是一套完整的计算平台体系。模组内部已高度集成 SoC、内存、电源、电源管理与时钟等复杂设计,并可兼容主流底板接口,支持丰富的 I/O,包括 MIPI、CAN-FD、以太网、USB、SPI与I2C 等,从而让开发者可以直接面向系统级方案进行设计。 平台具备从实时控制到大模型推理均能稳定输出的可靠性能,同时 Kalos 与 Aura 拥有紧凑小巧的体积(分别为69×55mm与82×54mm),非常适合部署于敏感空间或移动场景。借助这一平台化设计,开发者只需进行底板设计即可完成整机规划,大幅降低研发门槛。 整体而言,这一层的价值在于为机器人提供可量产级的坚实硬件基础,帮助不同形态的机器人以最低成本快速进入功能调试与商业测试阶段。 |

|

|

|

|

|


2026年5月23日,在“绿源2026智慧双核技术暨战神S系列新品发布会”上,绿源与深开鸿的...

5月20日,“舒适派 拥抱爱”——派雅门窗第五届超级品牌日暨「派雅杯」香港明星足球队...

在科技数码行业加速进化的当下,绿联已经完成了一次战略跃迁。随着绿联与全球品牌代言...

在新加坡资讯通信媒体发展局(IMDA)主办的2026年亚洲科技峰会(ATxSummit 2026)上,新加...

2026年5月20日,索尼(中国)有限公司正式发布1000X十周年典藏版头戴降噪耳机,承袭旗...

2026-05-25
2026-05-25
2026-05-25
2026-05-25



互联网违法和不良信息举报电话:12377 | 意见反馈:156562653@qq.com | 网上有害信息举报
中国商业网 | 粤ICP备19068152号-3 | 粤公网安备 46902302000xxx号 | ©2026 Comsenz Inc. Powered by Discuz! Licensed
粤公网安备 46902302000xxx号 | ©2026 Comsenz Inc. Powered by Discuz! Licensed